Des disparitions difficiles à élucider :
Chaque année en France, près de 40 000 personnes sont signalées disparues. En 2022, l’association ARPD a comptabilisé 60 000 « disparitions inquiétantes », dont 43 200 mineurs ; environ 1 000 dossiers restent, en pratique, sans solution [1,2]. Avec le temps, la probabilité de retrouver une personne disparue, vivante ou simplement ses restes, chute drastiquement. La densité végétale des sous-bois voire des forêts constitue alors un obstacle majeur, rendant inefficaces aussi bien l’observation aérienne que les capacités olfactives des chiens de recherche [3]. Dans les territoires ultra-marins comme la Martinique, les disparitions sont également nombreuses et la topographie des principales zones de disparition sont un véritable frein aux battues et à l’utilisation de moyens plus conventionnels pour rechercher une personne disparue [4,5]. Des télépilotes de drones de la Gendarmerie Nationale sont souvent requis pour des recherches mais les drones utilisés ne sont équipés que d’un capteur optique qui peine à détecter quoi que ce soit au travers de la végétation. Malgré tout, les drones ne sont pas inutiles en termes de missions de sauvetage, leur utilisation est très répandue aux Etats-Unis pour localiser des personnes accidentées dans la nature, pour leur transmettre un moyen de communication voire des médicaments ou des provisions [6–8]. Lorsque la canopée et la végétation dense rendent les recherches classiques inefficaces, une alternative s’impose : le LiDAR (Light Detection And Ranging). Déjà éprouvé dans de nombreux domaines dont l’archéologie, il pourrait apporter une véritable valeur ajoutée aux enquêtes judiciaires en milieu forestier [9–11].
Le pari du LiDAR
Le capteur LiDAR envoie jusqu’à 240 000 impulsions laser par seconde ; il mesure le temps que met chaque rayon à revenir à l’émetteur après avoir heurté un obstacle, reconstituant un nuage de points 3D [12]. Même si un gros pourcentage des faisceaux rebondit sur les feuilles, le reste atteint le sol et dessine son relief. On peut sélectionner une tranche de hauteur précise, par exemple, entre 15 et 50 cm au-dessus du sol supprimant de facto la canopée. Cette sélection donne accès aux différents volumes présents. Un corps ou un objet peuvent s’y distinguer du relief naturel [13].
Un test grandeur nature en Isère
En avril 2024, une équipe composée d’un anthropologue judiciaire et d’un spécialiste du télé pilotage et du capteur LiDAR a installé un volontaire allongé dans un bosquet de Montbonnot-Saint-Martin (Isère) ; afin de vérifier si un corps humain pouvait laisser une signature détectable par le capteur et ce malgré une densité de végétation importante. Le terrain, de 0,8 ha, recensait 721 arbres/ha et affichait un indice de végétation par différence normalisée (NDVI) entre +0,6 et +1, preuve d’une canopée particulièrement épaisse [13–15].
Deux capteurs LiDAR
| Capteur (DJI) | Échos max./point | Vitesse de vol | % de points « sol » | Verdict |
| Zenmuse L1 | 3 | 1,9 m/s | 0,11 % | Le corps est difficilement repérable |
| Zenmuse L2 | 5 | 2 m/s | 0,26 % | Silhouette détectée en quelques clics |
A la manière d’un GPS (Global Positioning System), l’écran de la radiocommande du drone permet d’avoir une vue au zenith de la zone de recherche. Lorsqu’une mission est programmée, une aire est renseignée et le logiciel du drone trace la route qu’il devra emprunter. Le drone avance en ligne droite puis arrivé à la limite de la zone opère une rotation à 90° avance, fait une nouvelle rotation de 90° et poursuit sa course dans le sens inverse. Lorsque le drone revient sur ses pas, le rayonnement du LiDAR recouvre le précédent passage permettant une acquisition sur et sous la canopée plus importante (figure 1).
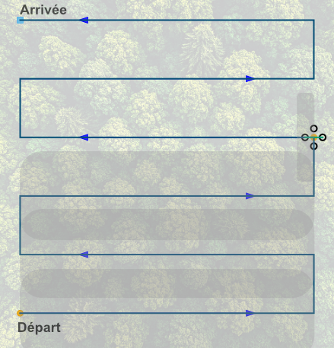
Figure 1 : Schématisation du parcours d’un drone. Les bandes grises représentent les zones scannées par le LiDAR. Les zones gris foncé représente le recouvrement du faisceau qui s’opère à chaque passage du drone.
Le test démontre que, même sous canopée dense, un LiDAR de dernière génération peut capter suffisamment de points au sol pour détecter un corps en surface
À l’issue d’un vol de 7 minutes, les données sont importées dans DJI Terra Pro puis TerraSolid. Le filtrage sur la tranche 0,15–0,50 m met en évidence une sur-densité caractéristique à l’emplacement du volontaire. La comparaison avec une acquisition témoin sans corps permet de distinguer les anomalies naturelles (rochers, souches) et de préparer une matrice de vrais/faux positifs destinée à mesurer la robustesse statistique de l’alerte.
Météo, règlementation : les freins du terrain
Le test démontre que, même sous une canopée dense, un LiDAR de dernière génération peut capter suffisamment de points au sol pour détecter un corps en surface (figure 2). La sélection d’une bande de hauteur adaptée est essentielle pour réduire le bruit issu des rochers ou troncs. Les conditions météorologiques (pluie, brouillard, vent > 30 km/h) restent limitantes, tout comme l’autonomie du drone et les contraintes réglementaires de distance.
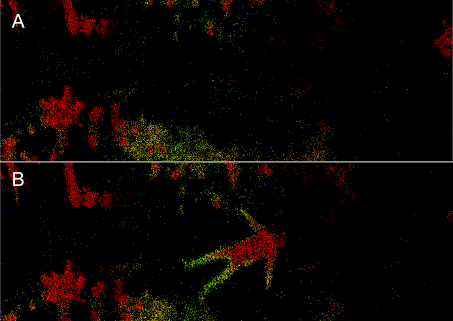
Figure 2 : A : acquisition sans corps disposé au sol, B : acquisition avec disposition au sol du volontaire.
L’intérêt est d’évaluer jusqu’à quel degré de décomposition les corps laisse une signature détectable par le LiDAR
Et pour la suite ?
Le LiDAR aéroporté offre un outil non destructif pour localiser des restes humains sous la végétation et documenter la topographie d’une scène en trois dimensions avant toute fouille, garantissant un accès en toute sécurité au corps. Son déploiement rapide (matériel léger, un à deux opérateurs) représente une alternative moins coûteuse et plus sûre que les battues humaines ou les vols hélicoptère dans un relief difficile.
Dans un premier temps, les recherches s’orientent plus sur la détection de corps de volontaires vivants mais pour les cas où les personnes sont supposées décédées, les tests devront être effectués sur des corps en état de décomposition. L’intérêt est d’évaluer jusqu’à quel degré de décomposition les corps laisse une signature détectable par le LiDAR. Ce genre de recherche ne peut avoir lieu en France à ce jour, des collaborations avec des laboratoires étrangers sont donc envisagées. Une autre possibilité serait de compléter l’utilisation du LiDAR avec d’autres capteurs comme les capteurs thermographiques ou multispectraux. Le capteur thermographique permettrait de détecter des sources de chaleurs liées à l’activité entomologique sur le corps [16]. Les capteurs multispectraux permettraient de détecter les modifications chimiques du sol ou de la végétation au fil du temps toujours en lien avec la putréfaction des corps [17,18].
En l’espace de quelques heures seulement, un simple nuage de points bruts se transforme en zone prioritaire à explorer
En conclusion
Cette étude démontre qu’un pourcentage infime de points “au sol” peut suffire à révéler la présence d’un corps dans une végétation habituellement considérée comme impénétrable. En l’espace de quelques heures seulement, un simple nuage de points bruts se transforme en zone prioritaire à explorer, réduisant à la fois l’étendue des recherches et l’attente anxieuse des familles. Reste à confirmer ces résultats sur d’autres types de forêts et avec de véritables donneurs, mais le LiDAR ouvre déjà une brèche dans l’opacité des disparitions.
Les résultats confirment que les capteurs LiDAR aéroportés sont capables de mettre en évidence la présence d’un corps dans des environnements fortement végétalisés. Dans les conditions les plus denses, la densité de points au sol a atteint 0,26 %. L’étude met en lumière la nécessité de perfectionner les techniques de post-traitement, en particulier la sélection des points du nuage et l’élaboration d’analyses de vrais/faux positifs, afin d’optimiser la fiabilité de la détection. Enfin, l’intégration de capteurs complémentaires, tels que les capteurs thermiques ou multispectraux, apparaît comme une piste prometteuse pour identifier plus finement les anomalies thermiques et les marqueurs chimiques associés à la décomposition.
Bibliographie
[1] ARPD | ARPD, (n.d.). https://www.arpd.fr/fr (accessed February 28, 2024).
[2] M. de l’Intérieur, Disparitions inquiétantes, http://www.interieur.gouv.fr/Archives/Archives-des-dossiers/2015-Dossiers/L-OCRVP-au-caeur-des-tenebres/Disparitions-inquietantes (accessed April 17, 2024).
[3] U. Pietsch, G. Strapazzon, D. Ambühl, V. Lischke, S. Rauch, J. Knapp, Challenges of helicopter mountain rescue missions by human external cargo: Need for physicians onsite and comprehensive training, Scandinavian Journal of Trauma, Resuscitation and Emergency Medicine 27 (2019). https://doi.org/10.1186/s13049-019-0598-2.
[4] C. Gratien, La mort de Benoit Lagrée officiellement reconnue, Martinique La 1ère (n.d.).
[5] Disparition de Marion à la Dominique : où en sont les recherches ?, guadeloupe.franceantilles.fr (2024). https://www.guadeloupe.franceantilles.fr/actualite/faits-divers/disparition-de-marion-a-la-dominique-ou-en-sont-les-recherches-976553.php (accessed October 25, 2024).
[6] C. Van Tilburg, First Report of Using Portable Unmanned Aircraft Systems (Drones) for Search and Rescue, Wilderness & Environmental Medicine 28 (2017) 116–118. https://doi.org/10.1016/j.wem.2016.12.010.
[7] Y. Karaca, M. Cicek, O. Tatli, A. Sahin, S. Pasli, M.F. Beser, S. Turedi, The potential use of unmanned aircraft systems (drones) in mountain search and rescue operations, The American Journal of Emergency Medicine 36 (2018) 583–588. https://doi.org/10.1016/j.ajem.2017.09.025.
[8] H.B. Abrahamsen, A remotely piloted aircraft system in major incident management: Concept and pilot, feasibility study, BMC Emergency Medicine 15 (2015). https://doi.org/10.1186/s12873-015-0036-3.
[9] J.C. Fernandez-Diaz, W.E. Carter, R.L. Shrestha, C.L. Glennie, Now You See It… Now You Don’t: Understanding Airborne Mapping LiDAR Collection and Data Product Generation for Archaeological Research in Mesoamerica, Remote Sensing 6 (2014) 9951–10001. https://doi.org/10.3390/rs6109951.
[10] T.S. Hare, M.A. Masson, B. Russell, High-Density LiDAR Mapping of the Ancient City of Mayapán, Remote. Sens. 6 (2014) 9064–9085.
[11] N.E. Mohd Sabri, M.K. Chainchel Singh, M.S. Mahmood, L.S. Khoo, M.Y.P. Mohd Yusof, C.C. Heo, M.D. Muhammad Nasir, H. Nawawi, A scoping review on drone technology applications in forensic science, SN Appl. Sci. 5 (2023) 233. https://doi.org/10.1007/s42452-023-05450-4.
[12] Zenmuse L2, DJI (n.d.). https://enterprise.dji.com.
[13] P. Nègre, K. Mahé, J. Cornacchini, Unmanned aerial vehicle (UAV) paired with LiDAR sensor to detect bodies on surface under vegetation cover: Preliminary test, Forensic Science International 369 (2025) 112411. https://doi.org/10.1016/j.forsciint.2025.112411.
[14] S. Li, L. Xu, Y. Jing, H. Yin, X. Li, X. Guan, High-quality vegetation index product generation: A review of NDVI time series reconstruction techniques, International Journal of Applied Earth Observation and Geoinformation 105 (2021) 102640. https://doi.org/10.1016/j.jag.2021.102640.
[15] Z. Davis, L. Nesbitt, M. Guhn, M. van den Bosch, Assessing changes in urban vegetation using Normalised Difference Vegetation Index (NDVI) for epidemiological studies, Urban Forestry & Urban Greening 88 (2023) 128080. https://doi.org/10.1016/j.ufug.2023.128080.
[16] J. Amendt, S. Rodner, C.-P. Schuch, H. Sprenger, L. Weidlich, F. Reckel, Helicopter thermal imaging for detecting insect infested cadavers, Science & Justice 57 (2017) 366–372. https://doi.org/10.1016/j.scijus.2017.04.008.
[17] J. Link, D. Senner, W. Claupein, Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming, Computers and Electronics in Agriculture 94 (2013) 20–28. https://doi.org/10.1016/j.compag.2013.03.003.
[18] R.M. Turner, M.M. MacLaughlin, S.R. Iverson, Identifying and mapping potentially adverse discontinuities in underground excavations using thermal and multispectral UAV imagery, Engineering Geology 266 (2020). https://doi.org/10.1016/j.enggeo.2019.105470.
Tous droits réservés - © 2026 Forenseek